Biomimetic Spider
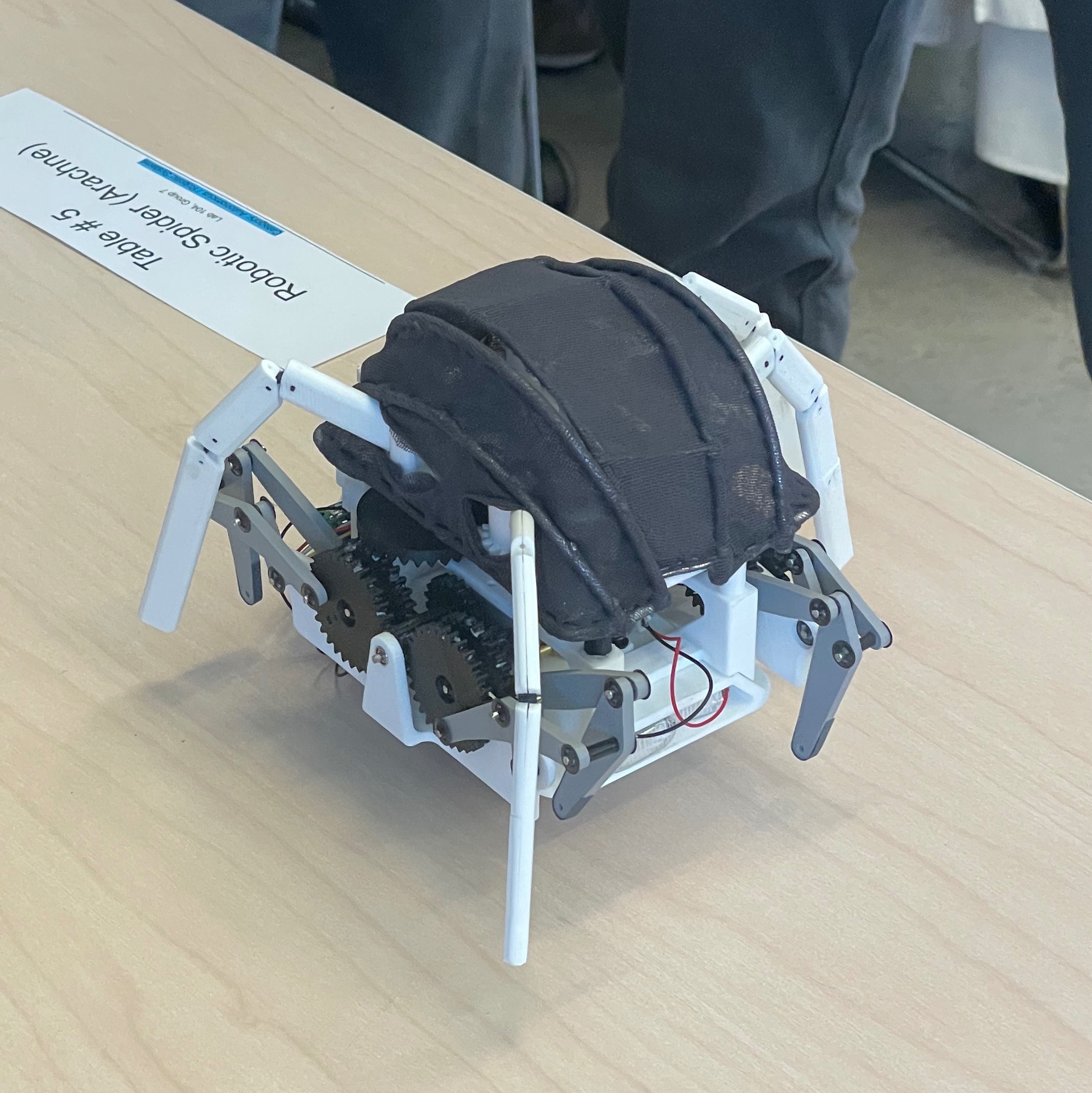
This was the capstone project for my mechanical engineering degree from UC Berkeley, and the final project for ME102B, a mechatronics class. Our team decided to pursue a spider robot with two primary goals which would distinguish the robot from existing, servo-based robots: biomimetic spider leg movement and a maximum of 3 DC motors for all movement.
Skills/Softwares
Onshape | Mechanical Design | Gears & Linkages | Prototyping | Arduino | 3D Printing | Controls Design | many more...

Design Process
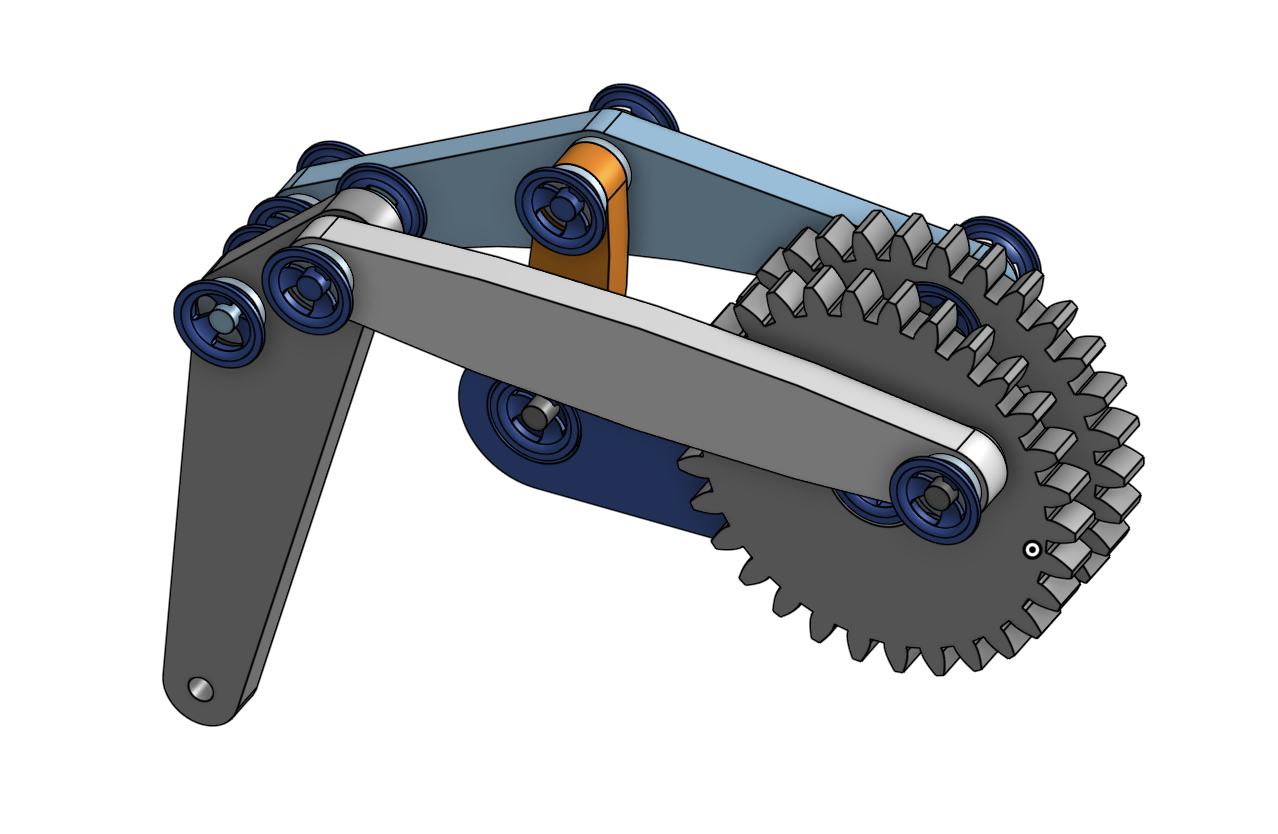
My primary contribution to this project was the mechanical design of the robot, including linkage and
gear train design. We first recreated the motion of a spider step using video resources and MotionGen,
giving us a 6-bar linkage that could be used for each front/rear leg. We then connected these to our DC motor,
one for each side of the spider, while gearing down the motor to increase torque and have the correct gait speed.
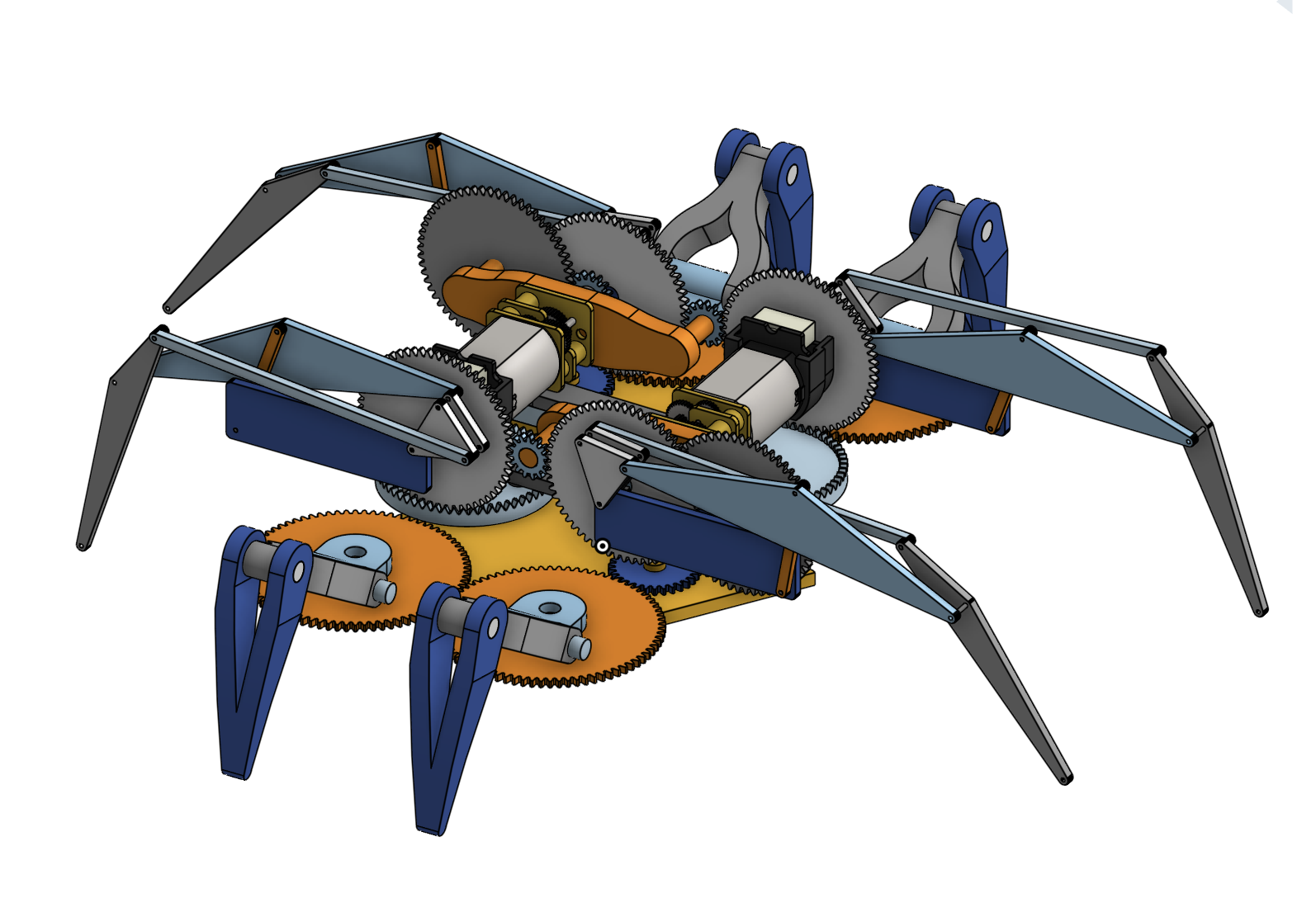
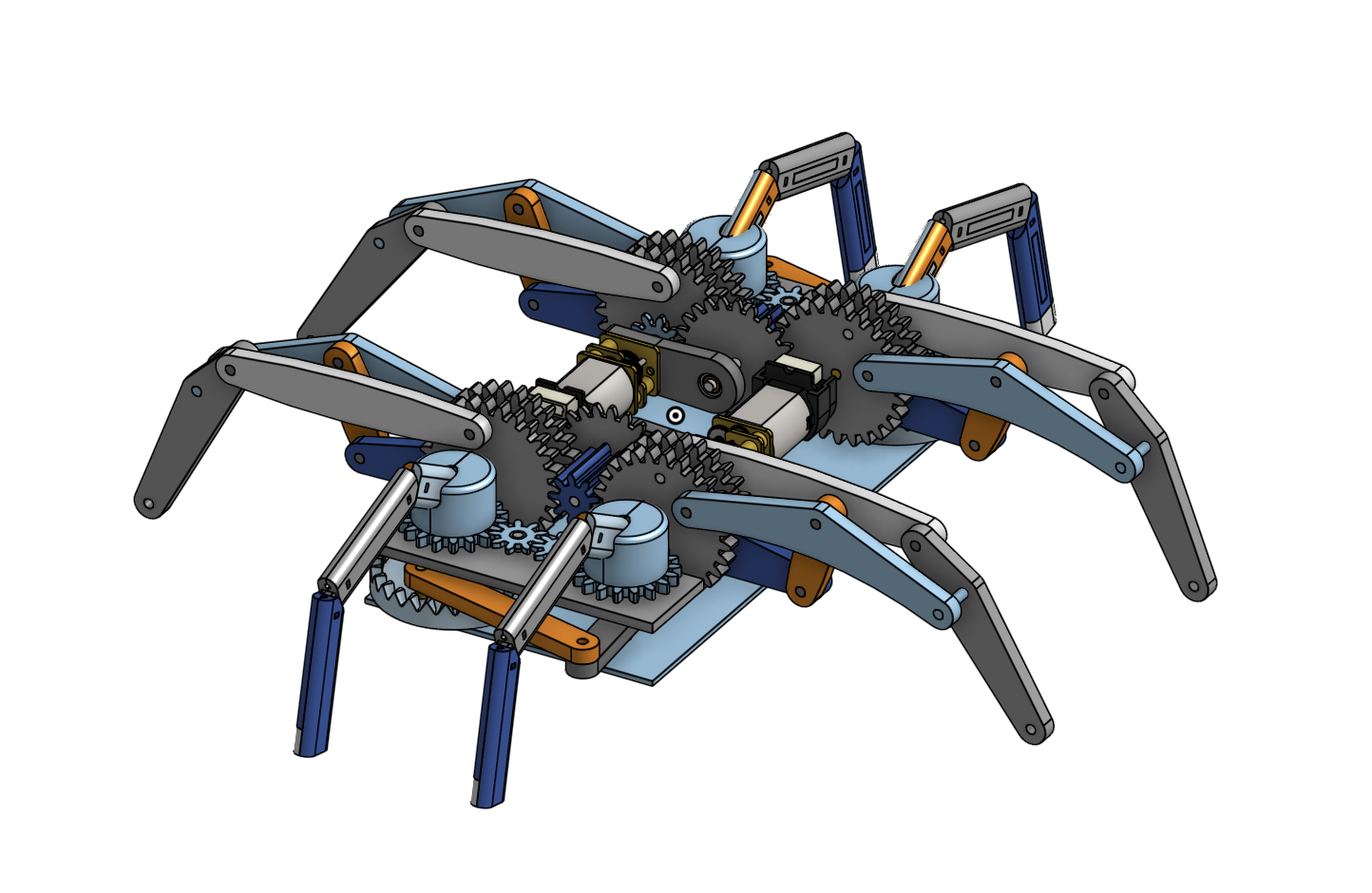
One motor drives a gear train which powers two legs, allowing the legs to move synchronously.
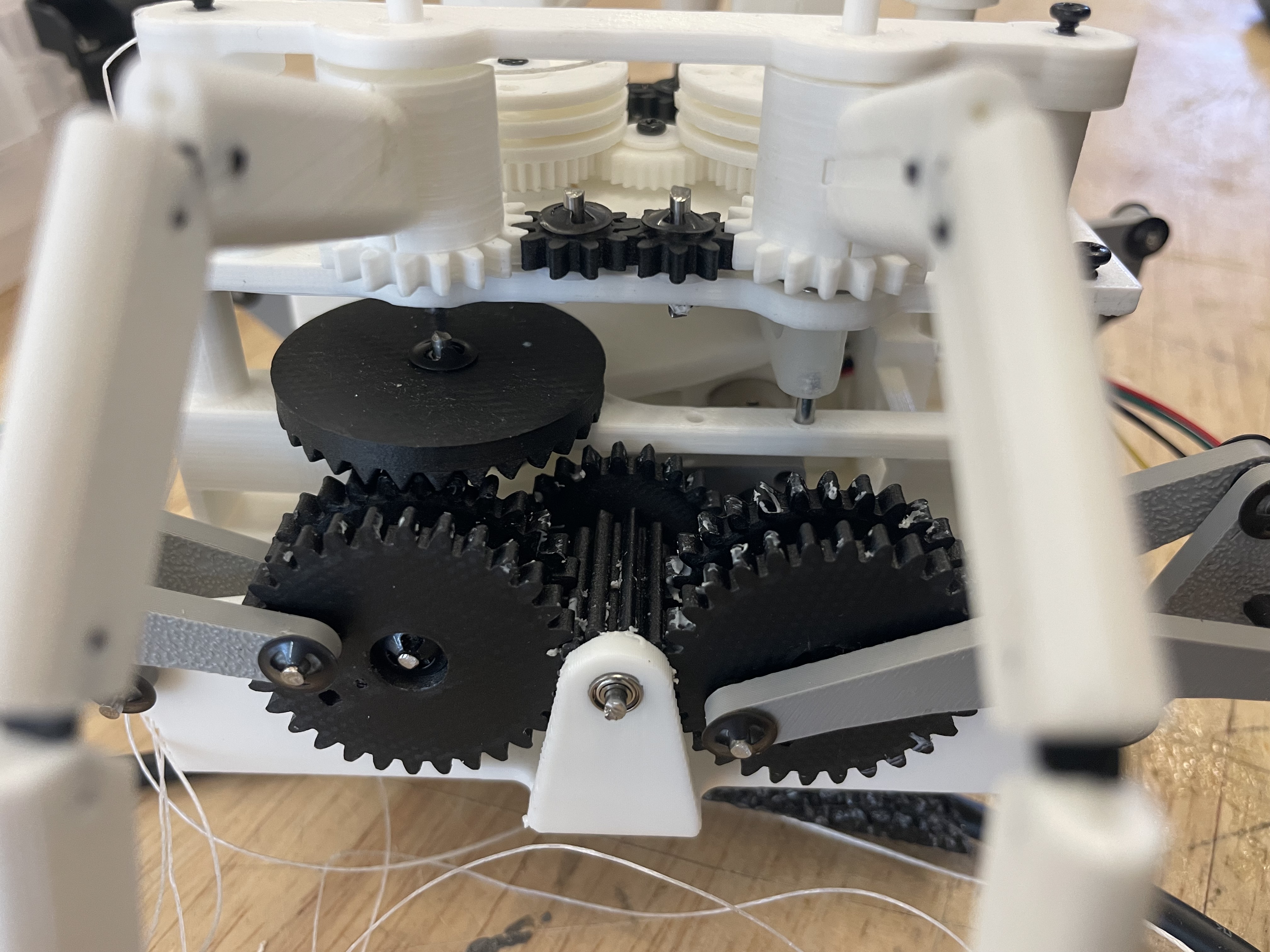
To move the side legs, we had to transfer the rotational motion of the front/rear legs 90 degrees and convert
it to oscillating motion, mimicking the proper motion of spiders' legs. We achieved this through a crown gear
and crank-rocker linkage, though we first tried a crank-driven rack and pinion. We settled on our final
choice as it allowed us to move the crown gear above the front/rear legs and place the crank-rocker inside
the body of the spider, minimizing the width of the robot. See below a selection of my CAD progression:
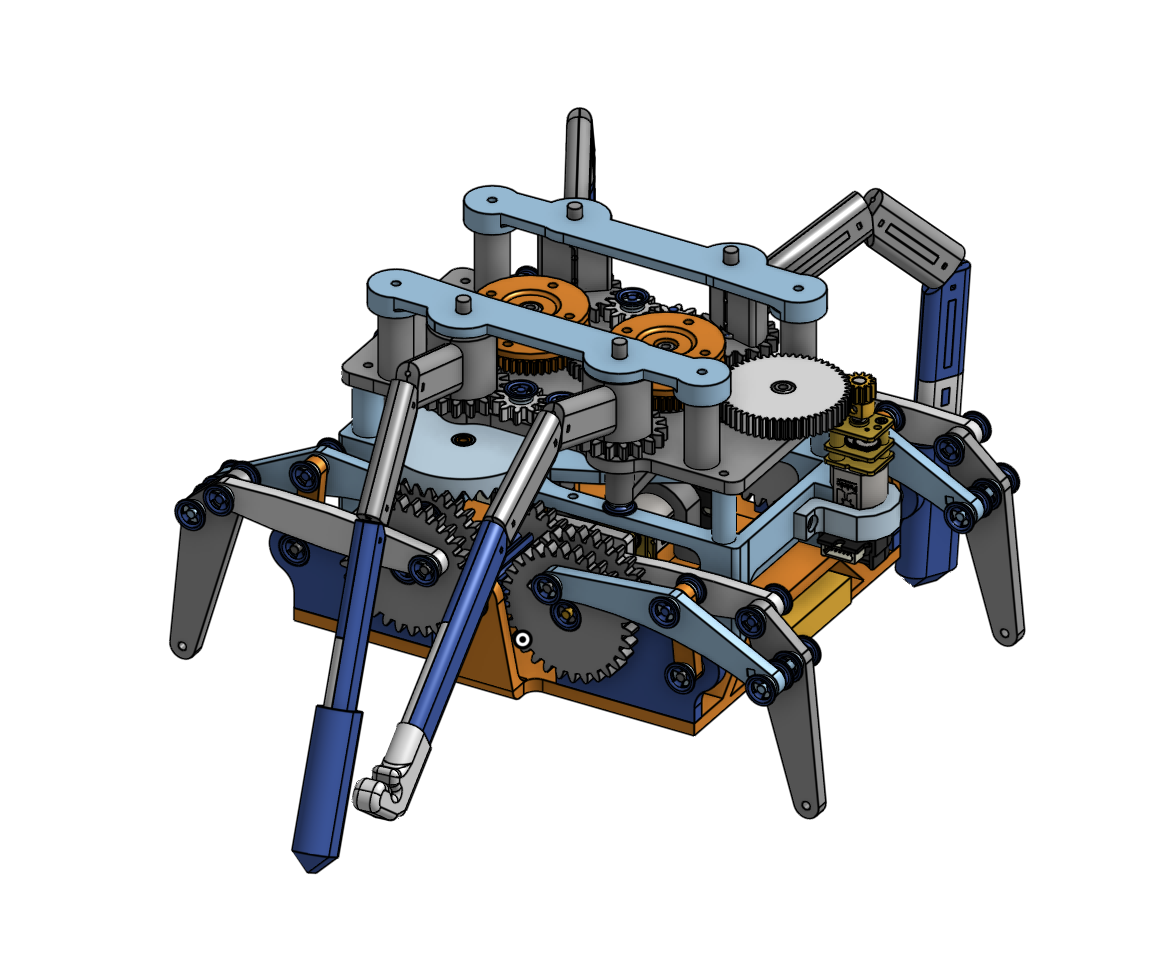
We further designed a tendon system to lift the side legs in time with each step. A unique spool on top of the robot
pulled opposite tendons, lifting the proper legs while allowing the others to make contace with the ground.
Finally, we powered the 3 total motors (1 for each set of 4 legs - 2 side, 2 front/back; 1 for the tendon system)
with thin Li-Ion batteries, controlled the system with an ESP32-C6 (chosen for it's size), and
utilized bluetooth control, including forward, reverse, and turning capabilities.
Lessons Learned
The vast usefullness of linkage systems for non-linear motion requirements.
The increased importance of tolerances in small-scale assemblies.
Snap ring retaining clips are difficult to install, yet somehow very easy to knock off at the wrong time.
Validate designs early.